Systemdesign
In den nachfolgenden Grafiken ist das Systemdesign des ArduSmartPilot dargestellt:
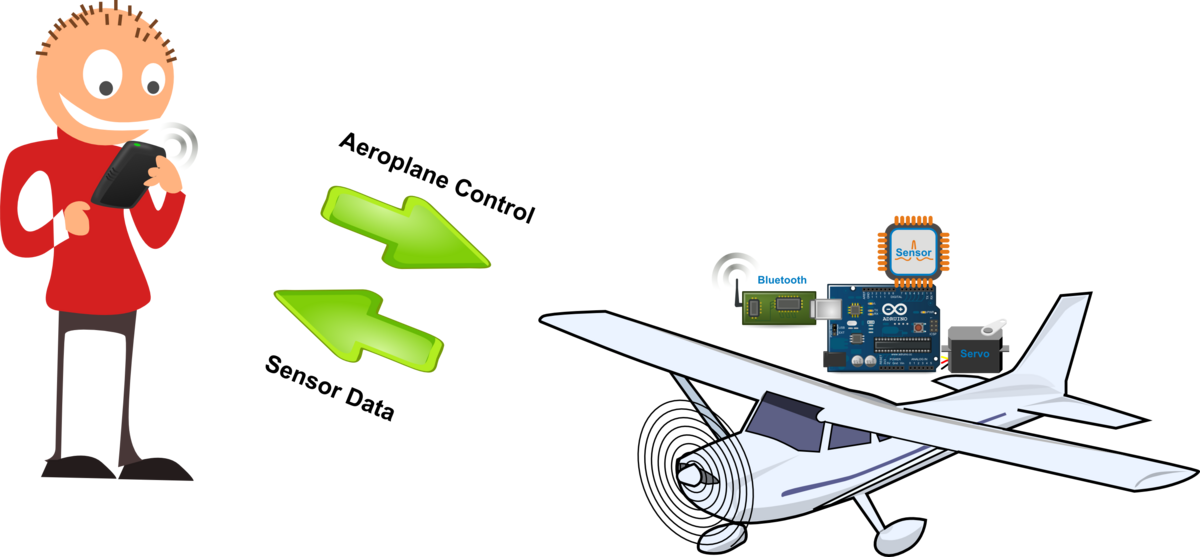
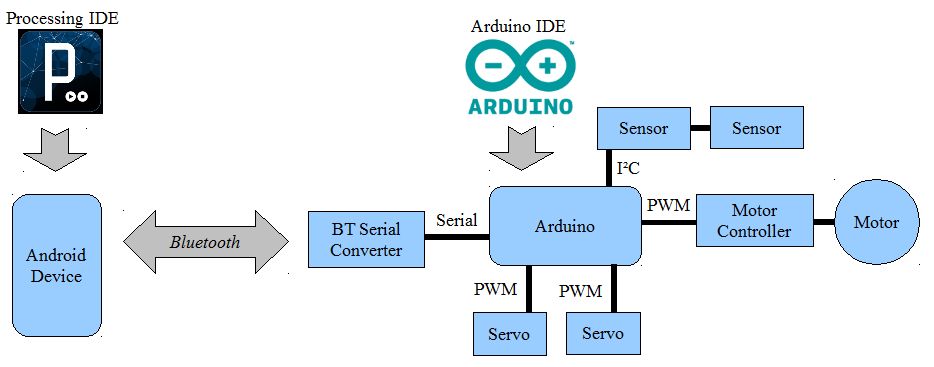
Mit der Open Source IDE Processing wird eine Android App erstellt. Diese App sendet die Steuerbefehle über Bluetooth an einen Bluetooth-Seriell-Konverter, der an einen Arduino angeschlossen ist. Die Steuerbefehle können z.B. eine auf dem Bildschirm gedrückte Taste, das Betätigen der seitlichen Lautstärketasten oder ein Kippen des Smartphones sein. Hierbei entscheiden die Schüler selbst, auf welche Weise sie das Flugzeug steuern möchten.
Der Arduino setzt diese Steuerbefehle in Pulsweiten-Signale (PWM) um, mit denen die beiden Servos und der Motorregler gesteuert werden.
Neben der Kommunikation vom Smartphone zum Flugzeug ist aber auch die Kommunikation in die Gegenrichtung notwendig:Der Arduino zählt die empfangenen Steuerbefehle pro Sekunde und meldet diesen Wert an das Smartphone zurück. Über diesen Wert kann die App des Smartphones erkennen, wenn die Funkverbindung an ihre Grenzreichweite kommt. (Der Arduino erkennt dies ebenfalls, und schaltet dann z.B. den Motor aus.)
Ein Pilot möchte aber noch weitere Informationen über den Zustand des Flugzeugs erfahren: Dazu wird vom Arduino die Akkuspannung gemessen. Weiter sind ein Drucksensor, ein 3-Achsen Beschleunigungs- und Drehratensensor an den Arduino angeschlossen.
Alle diese Werte werden ebenfalls vom Flugzeug an das Smartphone zurück gesendet.




